M-ABD: Scalable, Efficient, and Robust
Multi-Affine-Body Dynamics
ACM Transactions on Graphics (Proc. SIGGRAPH 2026)
1University of Utah 2MIT 3USC 4UCSD 5UCLA 6UBC
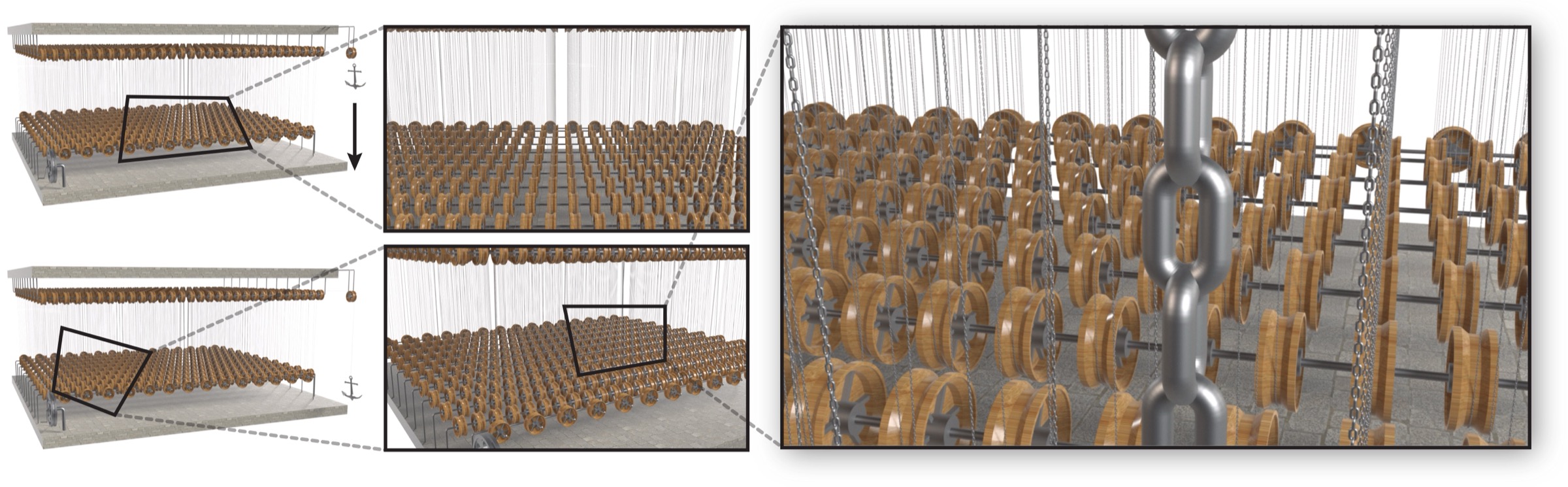
A huge pulley system. A representative example of a large-scale multibody system consisting of 1,076,748 links. Our method robustly simulates this system at h = 10−2 s using only one iteration per time step. The simulation takes 904 ms with a single CPU thread.
Video
Abstract
Simulating large-scale articulated assemblies poses a significant challenge due to the numerical stiffness and geometric complexity of jointed structures. Conventional rigid body solvers struggle with the high nonlinearity induced by rotation parameterization. This difficulty becomes more pronounced for multiple two-way-coupled bodies. This paper introduces a novel framework that leverages the linear kinematic mapping of Affine Body Dynamics (ABD). As ABD targets near-rigid objects, the constitutive variations of different materials become negligible, which justifies a co-rotational approach to isolate geometric nonlinearities of the system. This insight enables the use of constant system matrices that can be pre-factorized throughout the simulation, even with fully implicit integration schemes. To manage the high DOF counts of large-scale systems, we map primal body coordinates onto a compact dual space defined by minimal joint degrees of freedom. By solving the resulting KKT systems, our method ensures exact constraint enforcement and physically accurate motion propagation. We provide a suite of specialized solvers tailored for diverse joint topologies, including chains, trees, closed loops, and irregular networks. Experimental results show that our approach achieves interactive rates for systems with hundreds of thousands of bodies on a single CPU core, while maintaining excellent stability at large time steps.
Citation
@article{he2026mabd,
author = {He, Zhiyong and Guo, Dewen and Guo, Minghao and Zhao, Yili and
Matusik, Wojciech and Su, Hao and Jiang, Chenfanfu and
Chen, Peter Yichen and Yang, Yin},
title = {M-ABD: Scalable, Efficient, and Robust Multi-Affine-Body Dynamics},
journal = {ACM Transactions on Graphics},
year = {2026},
volume = {45},
number = {4},
month = jul,
doi = {10.1145/3811276},
publisher = {Association for Computing Machinery},
address = {New York, NY, USA},
}